View Source Supervising dynamic children
We have now successfully defined our supervisor which is automatically started (and stopped) as part of our application life cycle.
Remember, however, that our KV.Registry is both linking (via start_link) and monitoring (via monitor) bucket processes in the handle_cast/2 callback:
{:ok, bucket} = KV.Bucket.start_link([])
ref = Process.monitor(bucket)Links are bidirectional, which implies that a crash in a bucket will crash the registry. Although we now have the supervisor, which guarantees the registry will be back up and running, crashing the registry still means we lose all data associating bucket names to their respective processes.
In other words, we want the registry to keep on running even if a bucket crashes. Let's write a new registry test:
test "removes bucket on crash", %{registry: registry} do
KV.Registry.create(registry, "shopping")
{:ok, bucket} = KV.Registry.lookup(registry, "shopping")
# Stop the bucket with non-normal reason
Agent.stop(bucket, :shutdown)
assert KV.Registry.lookup(registry, "shopping") == :error
endThe test is similar to "removes bucket on exit" except that we are being a bit more harsh by sending :shutdown as the exit reason instead of :normal. If a process terminates with a reason other than :normal, all linked processes receive an EXIT signal, causing the linked process to also terminate unless it is trapping exits.
Since the bucket terminated, the registry also stopped, and our test fails when trying to GenServer.call/3 it:
1) test removes bucket on crash (KV.RegistryTest)
test/kv/registry_test.exs:26
** (exit) exited in: GenServer.call(#PID<0.148.0>, {:lookup, "shopping"}, 5000)
** (EXIT) no process: the process is not alive or there's no process currently associated with the given name, possibly because its application isn't started
code: assert KV.Registry.lookup(registry, "shopping") == :error
stacktrace:
(elixir) lib/gen_server.ex:770: GenServer.call/3
test/kv/registry_test.exs:33: (test)We are going to solve this issue by defining a new supervisor that will spawn and supervise all buckets. Opposite to the previous Supervisor we defined, the children are not known upfront, but they are rather started dynamically. For those situations, we use a supervisor optimized to such use cases called DynamicSupervisor. The DynamicSupervisor does not expect a list of children during initialization; instead each child is started manually via DynamicSupervisor.start_child/2.
The bucket supervisor
Since a DynamicSupervisor does not define any children during initialization, the DynamicSupervisor also allows us to skip the work of defining a whole separate module with the usual start_link function and the init callback. Instead, we can define a DynamicSupervisor directly in the supervision tree, by giving it a name and a strategy.
Open up lib/kv/supervisor.ex and add the dynamic supervisor as a child as follows:
def init(:ok) do
children = [
{KV.Registry, name: KV.Registry},
{DynamicSupervisor, name: KV.BucketSupervisor, strategy: :one_for_one}
]
Supervisor.init(children, strategy: :one_for_one)
endRemember that the name of a process can be any atom. So far, we have named processes with the same name as the modules that define their implementation. For example, the process defined by KV.Registry was given a process name of KV.Registry. This is simply a convention: If later there is an error in your system that says, "process named KV.Registry crashed with reason", we know exactly where to investigate.
In this case, there is no module, so we picked the name KV.BucketSupervisor. It could have been any other name. We also chose the :one_for_one strategy, which is currently the only available strategy for dynamic supervisors.
Run iex -S mix so we can give our dynamic supervisor a try:
iex> {:ok, bucket} = DynamicSupervisor.start_child(KV.BucketSupervisor, KV.Bucket)
{:ok, #PID<0.72.0>}
iex> KV.Bucket.put(bucket, "eggs", 3)
:ok
iex> KV.Bucket.get(bucket, "eggs")
3DynamicSupervisor.start_child/2 expects the name of the supervisor and the child specification of the child to be started.
The last step is to change the registry to use the dynamic supervisor:
def handle_cast({:create, name}, {names, refs}) do
if Map.has_key?(names, name) do
{:noreply, {names, refs}}
else
{:ok, pid} = DynamicSupervisor.start_child(KV.BucketSupervisor, KV.Bucket)
ref = Process.monitor(pid)
refs = Map.put(refs, ref, name)
names = Map.put(names, name, pid)
{:noreply, {names, refs}}
end
endThat's enough for our tests to pass but there is a resource leakage in our application. When a bucket terminates, the supervisor will start a new bucket in its place. After all, that's the role of the supervisor!
However, when the supervisor restarts the new bucket, the registry does not know about it. So we will have an empty bucket in the supervisor that nobody can access! To solve this, we want to say that buckets are actually temporary. If they crash, regardless of the reason, they should not be restarted.
We can do this by passing the restart: :temporary option to use Agent in KV.Bucket:
defmodule KV.Bucket do
use Agent, restart: :temporaryLet's also add a test to test/kv/bucket_test.exs that guarantees the bucket is temporary:
test "are temporary workers" do
assert Supervisor.child_spec(KV.Bucket, []).restart == :temporary
endOur test uses the Supervisor.child_spec/2 function to retrieve the child specification out of a module and then assert its restart value is :temporary. At this point, you may be wondering why use a supervisor if it never restarts its children. It happens that supervisors provide more than restarts, they are also responsible for guaranteeing proper startup and shutdown, especially in case of crashes in a supervision tree.
Supervision trees
When we added KV.BucketSupervisor as a child of KV.Supervisor, we began to have supervisors that supervise other supervisors, forming so-called "supervision trees".
Every time you add a new child to a supervisor, it is important to evaluate if the supervisor strategy is correct as well as the order of child processes. In this case, we are using :one_for_one and the KV.Registry is started before KV.BucketSupervisor.
One flaw that shows up right away is the ordering issue. Since KV.Registry invokes KV.BucketSupervisor, then the KV.BucketSupervisor must be started before KV.Registry. Otherwise, it may happen that the registry attempts to reach the bucket supervisor before it has started.
The second flaw is related to the supervision strategy. If KV.Registry dies, all information linking KV.Bucket names to bucket processes is lost. Therefore the KV.BucketSupervisor and all children must terminate too - otherwise we will have orphan processes.
In light of this observation, we should consider moving to another supervision strategy. The two other candidates are :one_for_all and :rest_for_one. A supervisor using the :rest_for_one strategy will kill and restart child processes which were started after the crashed child. In this case, we would want KV.BucketSupervisor to terminate if KV.Registry terminates. This would require the bucket supervisor to be placed after the registry which violates the ordering constraints we have established two paragraphs above.
So our last option is to go all in and pick the :one_for_all strategy: the supervisor will kill and restart all of its children processes whenever any one of them dies. This is a completely reasonable approach for our application, since the registry can't work without the bucket supervisor, and the bucket supervisor should terminate without the registry. Let's reimplement init/1 in KV.Supervisor to encode those properties:
def init(:ok) do
children = [
{DynamicSupervisor, name: KV.BucketSupervisor, strategy: :one_for_one},
{KV.Registry, name: KV.Registry}
]
Supervisor.init(children, strategy: :one_for_all)
endThere are two topics left before we move on to the next chapter.
Shared state in tests
So far we have been starting one registry per test to ensure they are isolated:
setup do
registry = start_supervised!(KV.Registry)
%{registry: registry}
endSince we have changed our registry to use KV.BucketSupervisor, our tests are now relying on this shared supervisor even though each test has its own registry. The question is: should we?
It depends. It is ok to rely on shared state as long as we depend only on a non-shared partition of this state. Although multiple registries may start buckets on the shared bucket supervisor, those buckets and registries are isolated from each other. We would only run into concurrency issues if we used a function like DynamicSupervisor.count_children(KV.BucketSupervisor) which would count all buckets from all registries, potentially giving different results when tests run concurrently.
Since we have relied only on a non-shared partition of the bucket supervisor so far, we don't need to worry about concurrency issues in our test suite. In case it ever becomes a problem, we can start a supervisor per test and pass it as an argument to the registry start_link function.
Observer
Now that we have defined our supervision tree, it is a great opportunity to introduce the Observer tool that ships with Erlang. Start your application with iex -S mix and key this in:
iex> :observer.start()Missing dependencies
When running
iexinside a project withiex -S mix,observerwon't be available as a dependency. To do so, you will need to call the following functions before:iex> Mix.ensure_application!(:wx) # Not necessary on Erlang/OTP 27+ iex> Mix.ensure_application!(:runtime_tools) # Not necessary on Erlang/OTP 27+ iex> Mix.ensure_application!(:observer) iex> :observer.start()If any of the calls above fail, here is what may have happened: some package managers default to installing a minimized Erlang without WX bindings for GUI support. In some package managers, you may be able to replace the headless Erlang with a more complete package (look for packages named
erlangvserlang-noxon Debian/Ubuntu/Arch). In others managers, you may need to install a separateerlang-wx(or similarly named) package.There are conversations to improve this experience in future releases.
A GUI should pop up containing all sorts of information about our system, from general statistics to load charts as well as a list of all running processes and applications.
In the Applications tab, you will see all applications currently running in your system alongside their supervision tree. You can select the kv application to explore it further:
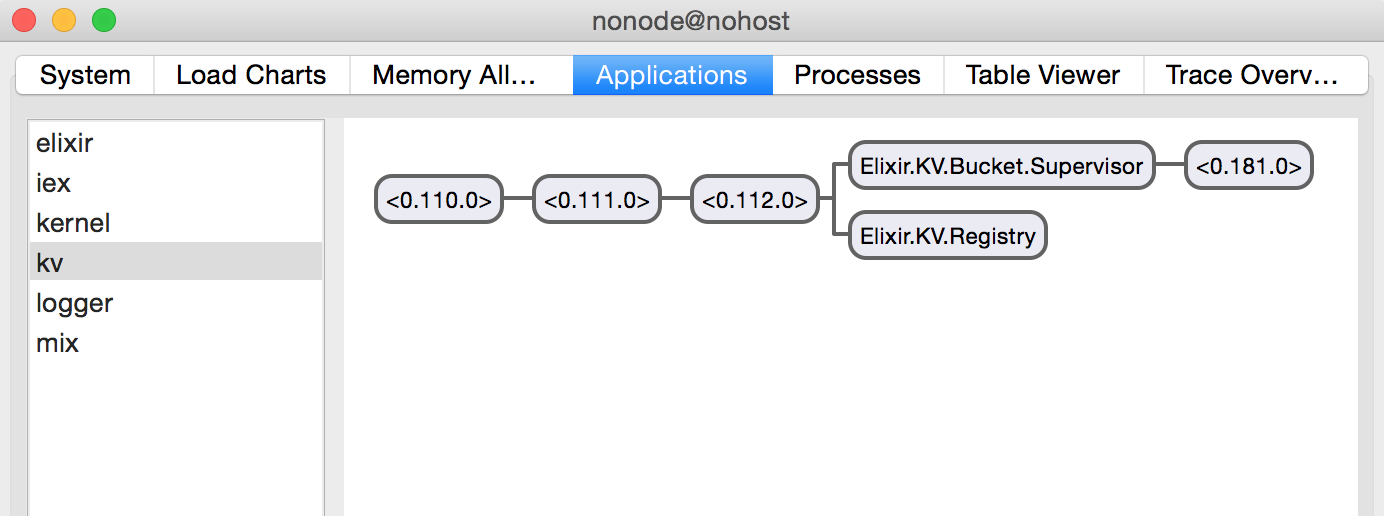
Not only that, as you create new buckets on the terminal, you should see new processes spawned in the supervision tree shown in Observer:
iex> KV.Registry.create(KV.Registry, "shopping")
:okWe will leave it up to you to further explore what Observer provides. Note you can double-click any process in the supervision tree to retrieve more information about it, as well as right-click a process to send "a kill signal", a perfect way to emulate failures and see if your supervisor reacts as expected.
At the end of the day, tools like Observer are one of the reasons you want to always start processes inside supervision trees, even if they are temporary, to ensure they are always reachable and introspectable.
Now that our buckets are properly linked and supervised, let's see how we can speed things up.